-
AI & Cognitive Robotics
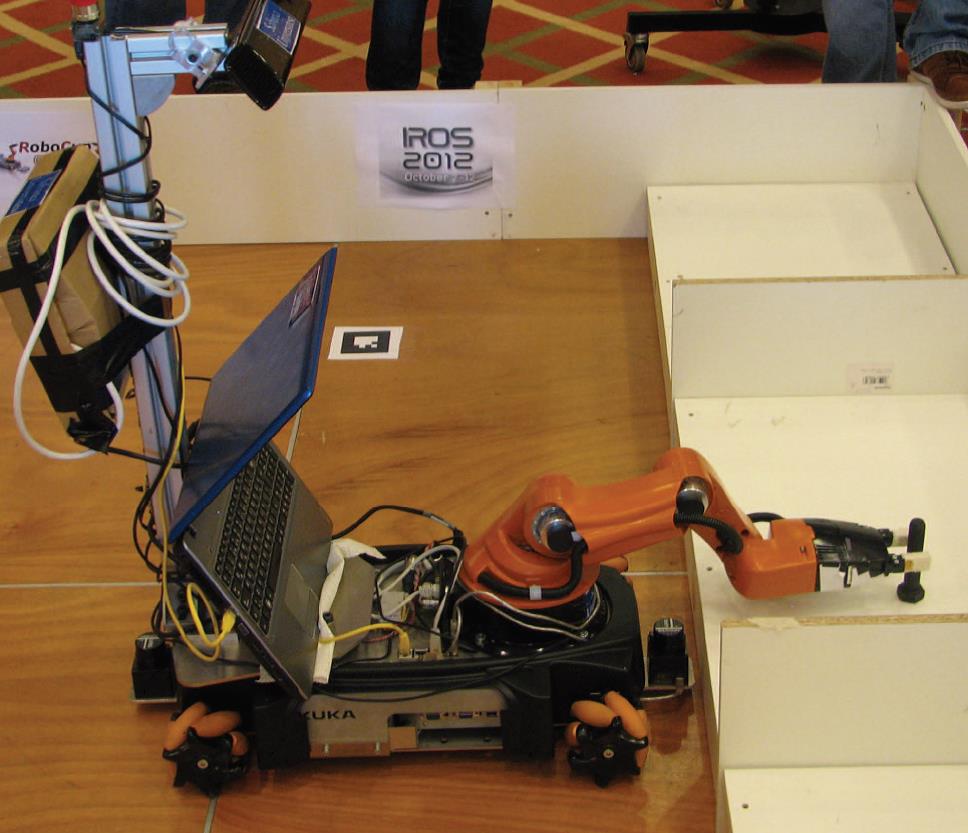
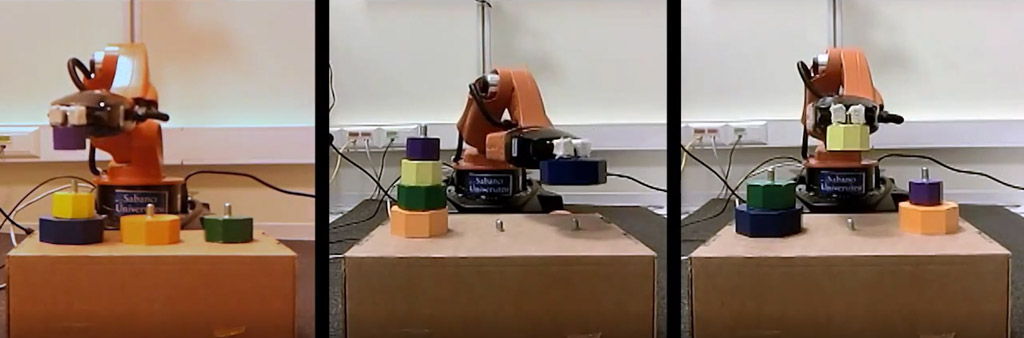
Cognitive Robotics (CogRobo) is concerned with endowing robotic or software agents with higher level cognitive functions that involve reasoning, for example, about goals, perception, actions, the mental states of other agents, collaborative task execution. Our research has mainly been on bridging the gap between high-level reasoning and low-level control, involving both theoretical and hands-on components.
Due the interdisciplinary and synergistic nature of this research area, we study various topics, including kinematic and dynamic modeling of robots, architectures for robot control, world maps and localization, object recognition, manipulation and path planning, human-robot interaction, AI planning, sensing and monitoring, diagnosis, learning, representation and reasoning formalisms and algorithms, and methods for coupling high-level reasoning with low-level feasibility checks. We apply our methods in different robotic application domains, such as robotic manipulation, cognitive factories, service robotics, cognitive rehabilitation robotics, computer games, cloud robotics.
CogRobo Group has emerged from collaborations between Knowledge Representation and Reasoning Group and Human-Machine Interaction Laboratory.
Website
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Esra Erdem
Knowledge Representation and Reasoning
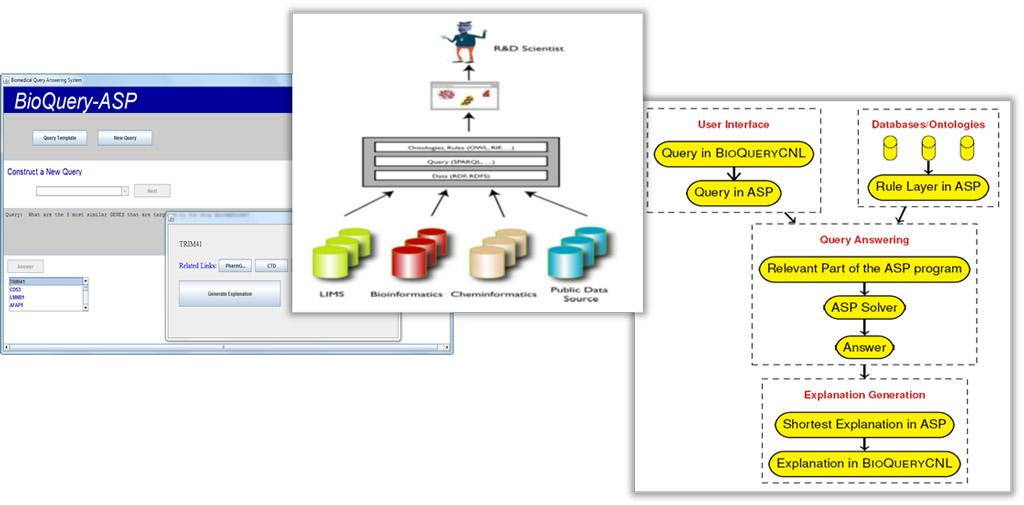
Knowledge Representation and Reasoning (KR&R) is the study of representing knowledge in such a way that a computer can reason about it (infer appropriate knowledge from it) to behave intelligently. We conduct research in various areas in KR&R, such as answer set programming, declarative problem solving, reasoning about actions and change, planning, ontological representation and reasoning, query answering over big data (on the web and on the cloud), explanation generation.
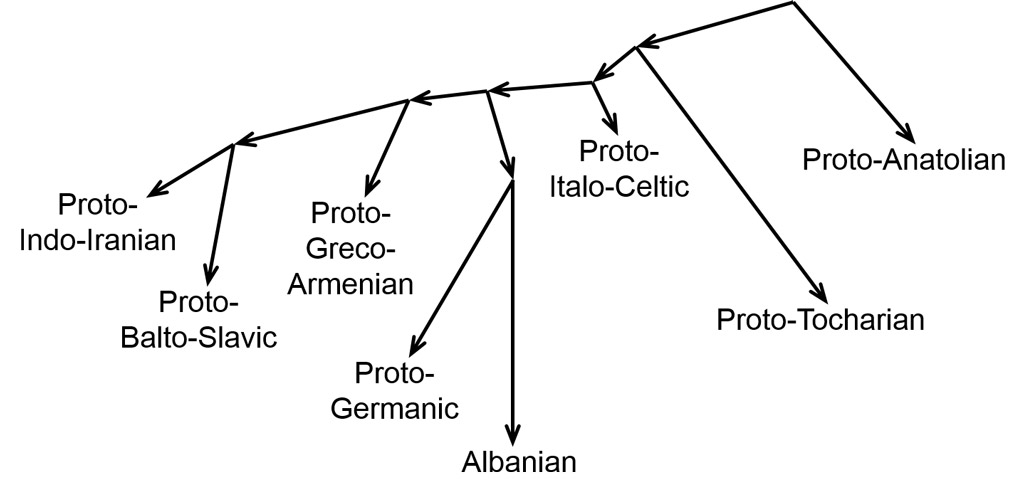
Our research in KR&R has mainly been along two lines: on the mathematical foundations of KR&R, and their applications to computer sciences and other sciences (e.g., robotics, logical puzzles, computer games, VLSI design, historical linguistics, Semantic Web, biomedical informatics, and computational biology).
Website
{kind=link}
{kind=link}
{kind=link}
{kind=link}
-
Machine Learning and Computer Vision
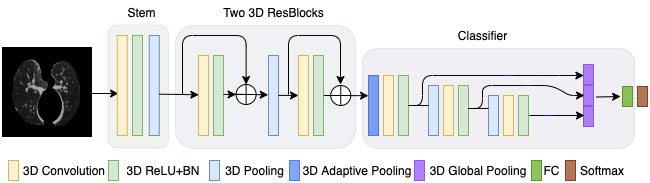
Our research is mainly in the intersection of machine learning and computer vision, with applications in diverse areas from medical image understanding to biometrics. In the medical domain, we have recently developed a system to detect Covid-19 in CT images, as well as a system that can differentiate between different skin cancer categories with high accuracy. In biometrics, we have developed online and offline signature verifications systems that have obtained first place positions in many international competitions. Another recent work in image understanding involves plant identification and plant disease classification, with the goal of supporting smart agriculture. Finally, we have worked on understanding handwritten text (online or offline), for both Turkish and English, for many years. We use both deep learning and traditional computer vision techniques as applicable.
{kind=link}
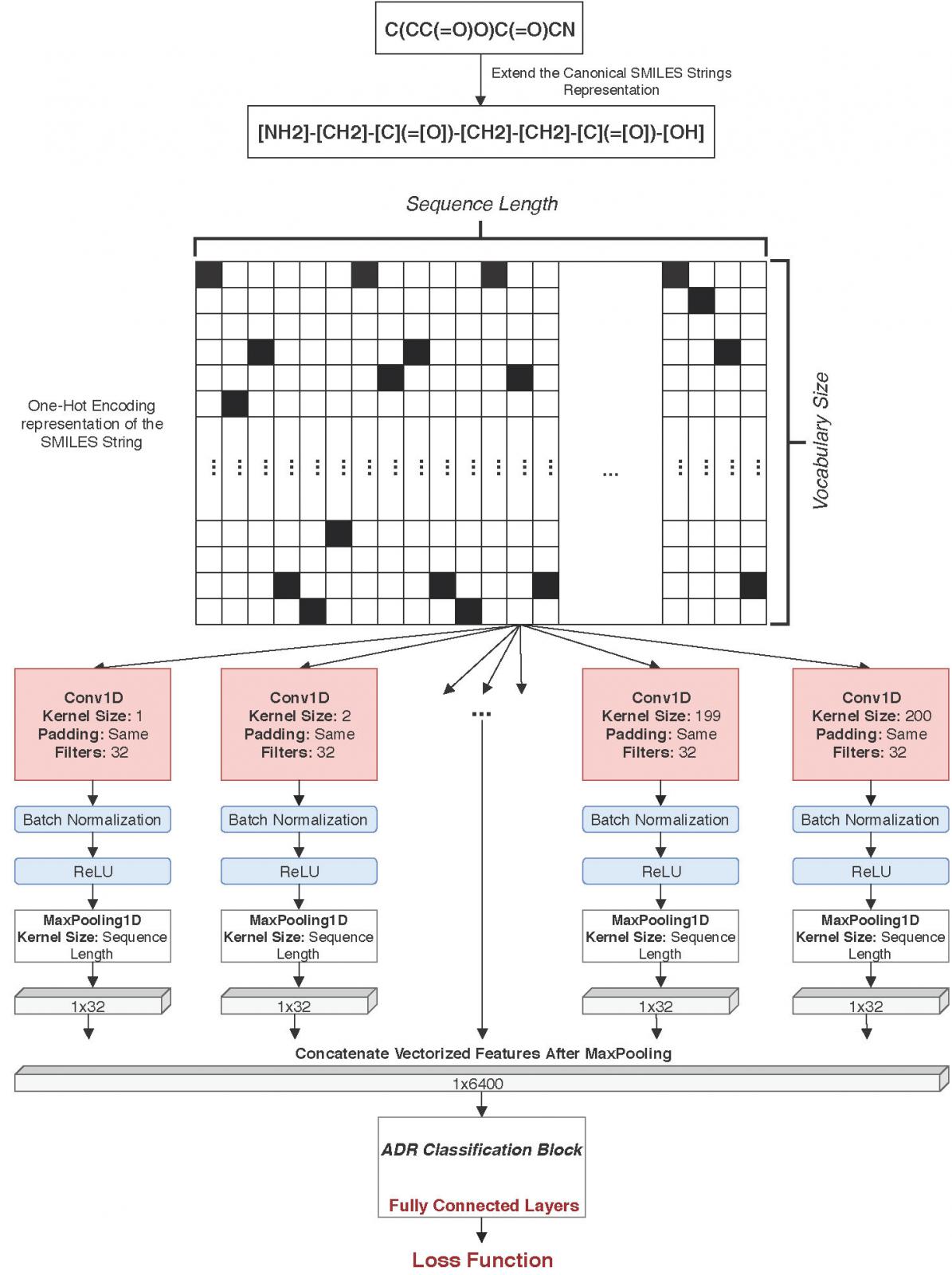
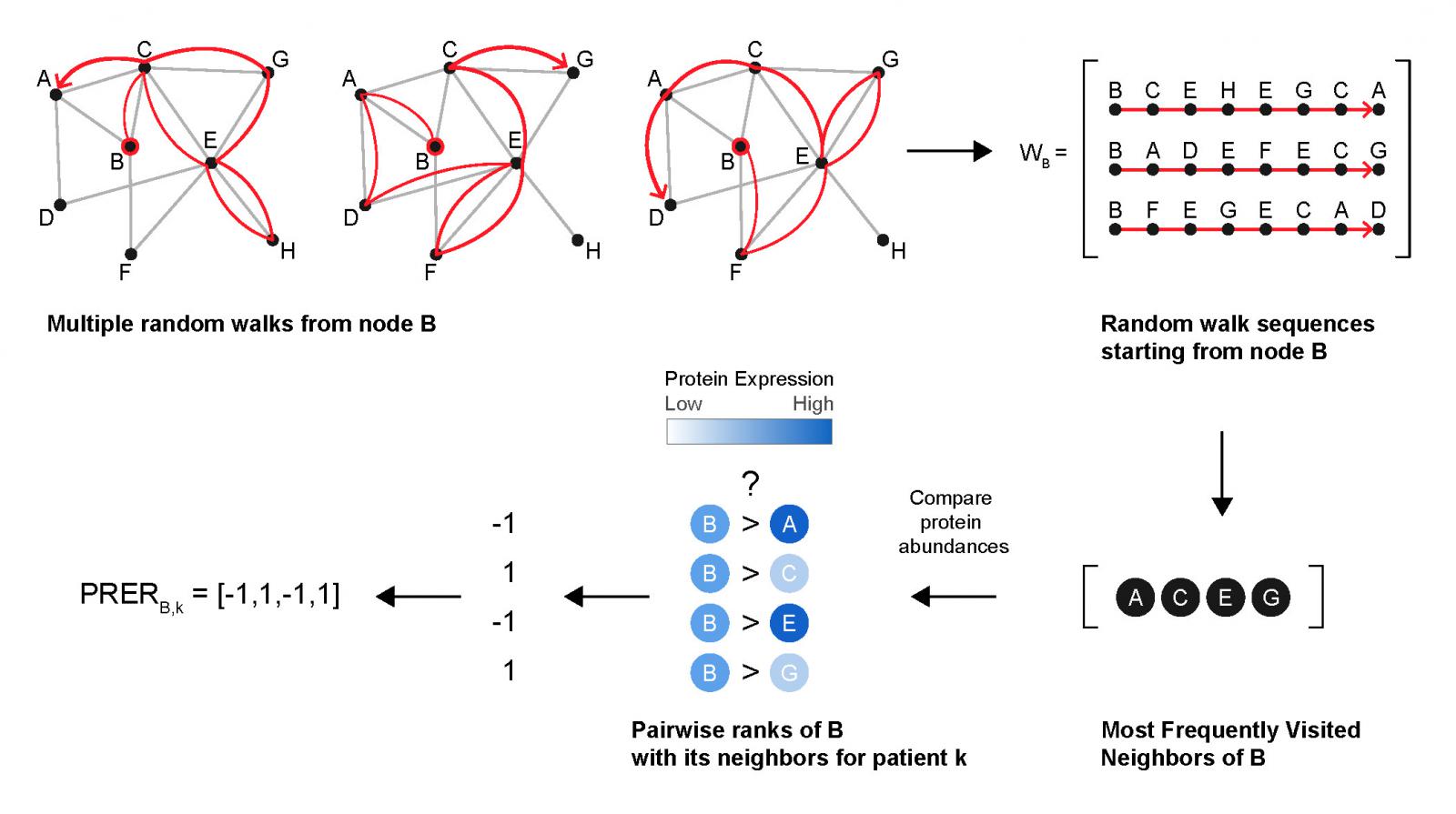
Machine Learning for Biology and Medicine
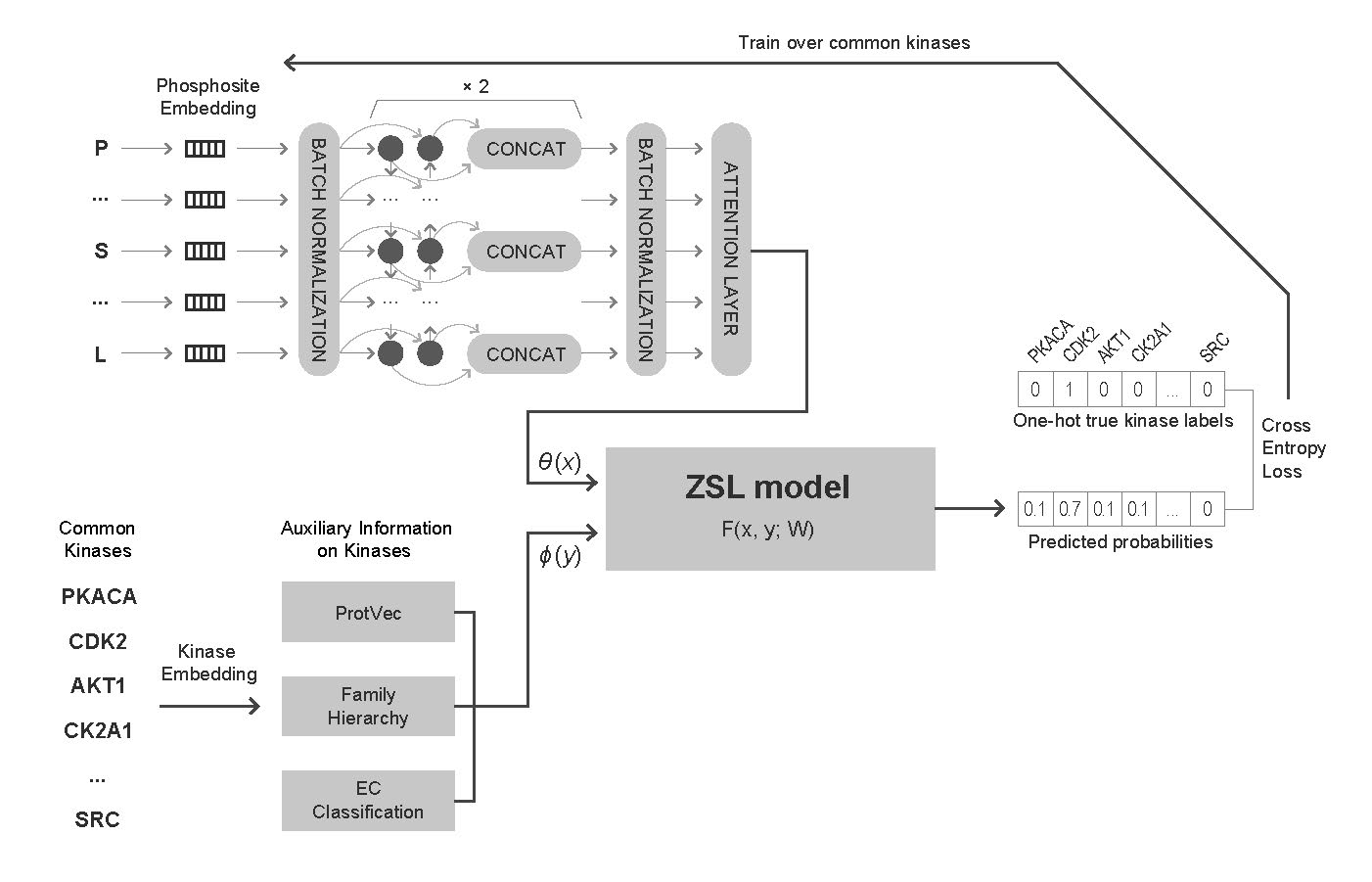
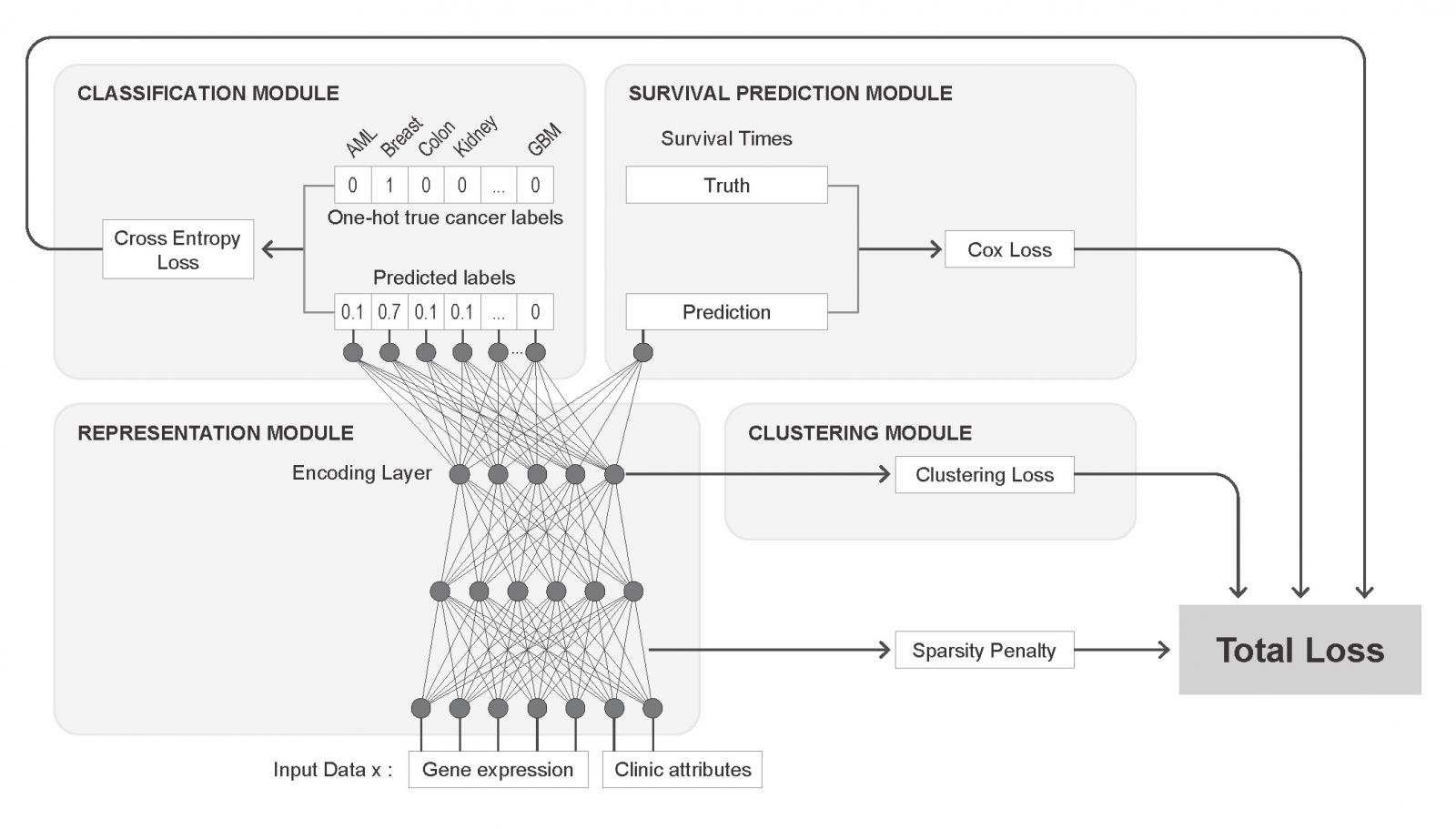
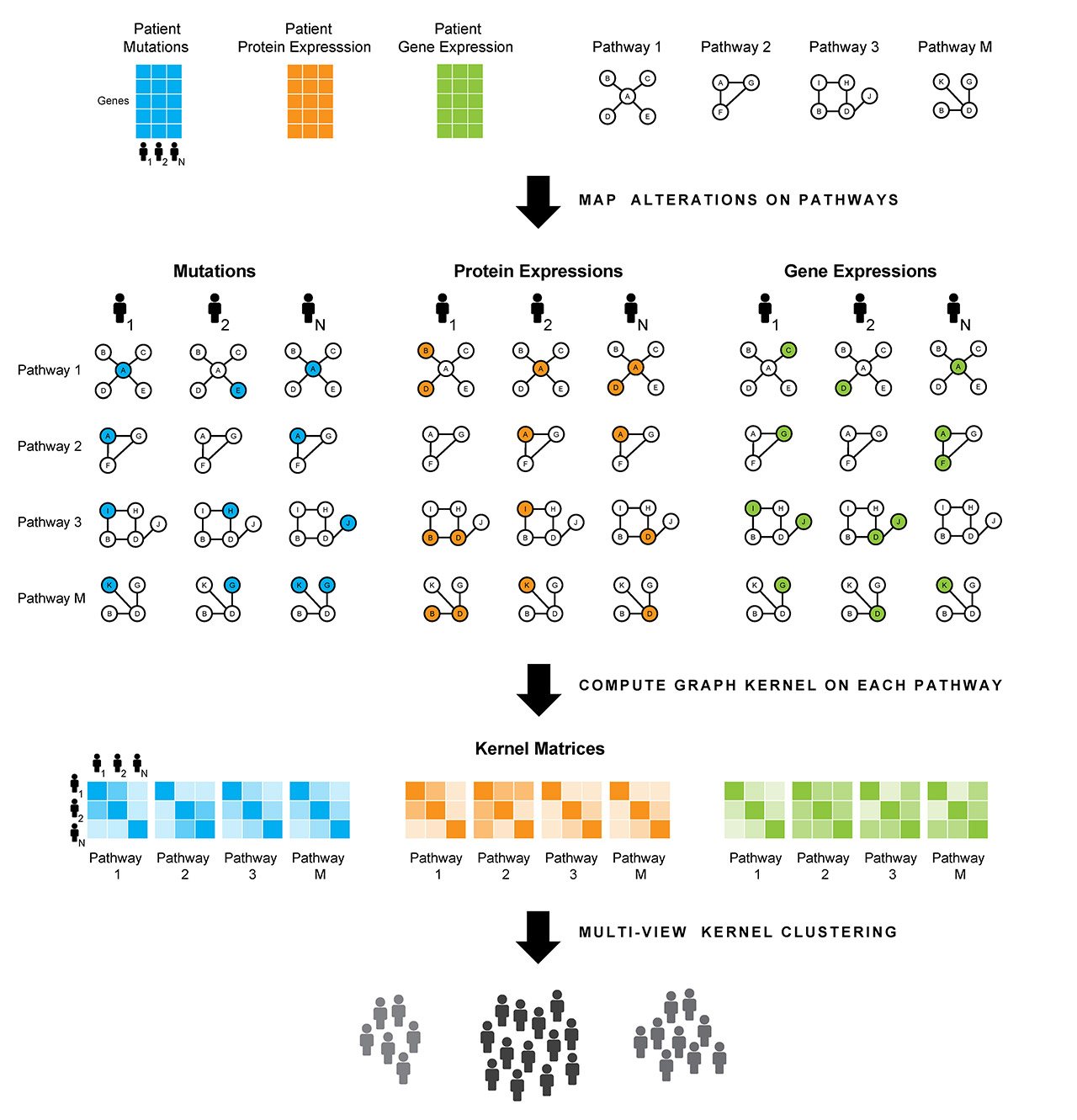
Machine learning aims at developing computer systems that can perform tasks without explicit instructions and improve themselves with experience, where the experience is encoded as data. Machine learning for biology and medicine apply and develop machine learning approaches to integrate and analyze biological data to answer key questions in biology and medicine.
Advances in molecular profiling technologies have resulted in large quantities of data, turning biology into a data rich field. A multitude of datasets collected from both normal and disease tissues is now available for large cohorts. Our research aims at using this data effectively to deepen our understanding of the molecular basis of the workings of the cell, diseases, and to translate this knowledge into clinics for improving patient care. The methods we develop rely on a wide range of machine learning approaches, including deep learning, kernel-based methods, graph machine learning. For more information, please visit our research group page.
Website
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
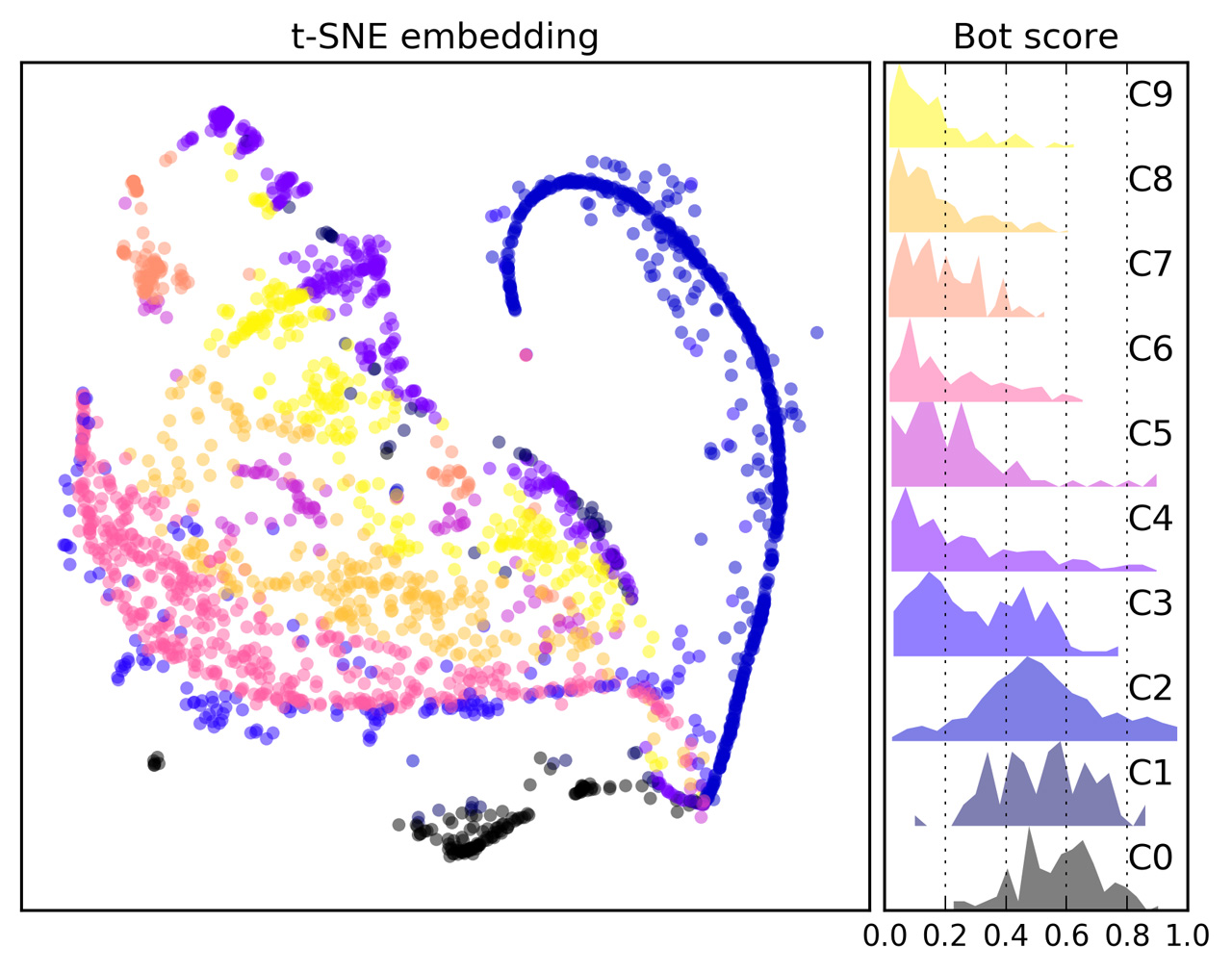
Machine Learning
We built tools for detecting malicious entities online. Our research analyze activities of social media accounts to detect social bots and coordinated malicious activities. We employ machine learning and deep learning techniques for temporal and graph data.
Our research aims developing techniques to analyze online behaviors. Our group specialize on network science, machine learning and deep learning applications to identify social bots and other malicious entities.
Website
{kind=link}
Natural Language Processing, Information Retrieval and Extraction
Natural language processing (NLP) is a branch of artificial intelligence (AI) which aims to automate the analysis, generation and acquisition of natural languages. Information retrieval (IR) deals with the analysis and search of large data collections. After retrieving a small relevant subset; information extraction and NLP approaches are applied to extract useful information.
Our research aims to develop state-of-the-art models for retrieving and extracting information from large collections of text. We employ machine learning and deep neural network based approaches to help machines understand these text collections. In our research group, we mainly focus on social media and news content in different languages, but mostly in Turkish and English. For more information regarding our current projects, please visit our lab page.
Website